µPhase VERTICAL PRO
3 janvier 2022
Micromanipulateur 5 axes
22 février 2022
OptoBot
Mesures réalisées via un robot
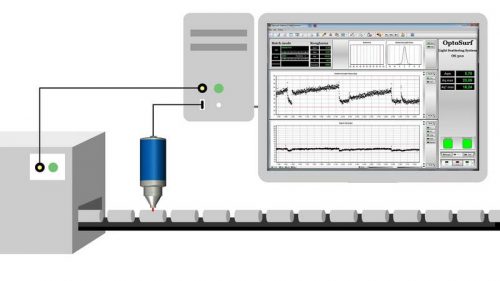
Les systèmes robotisés modernes et très précis sont un élément essentiel de la réussite des projets d’automatisation des processus. Le manque de sensibilité du capteur permet de mesurer des surfaces finement usinées dans la gamme submicrométrique à l’aide d’un bras de robot. Celui-ci est monté directement sur la plaque de montage et les six axes peuvent être utilisés. Grâce à cette combinaison unique, il est possible de mesurer de grandes pièces, parfois même à géométrie complexe.
Le programme de mesure est défini et enregistré dans le logiciel OptoSurf, qui se connecte à une interface logicielle du robot. Pour démarrer une mesure, un signal de déclenchement est utilisé.
Les mesures de rugosité ne sont pas influencées par les oscillations émises par les robots.
Programmable de manière flexible
Peut être utilisé comme cellule robotique séparée ou dans la ligne de production.
Interface d’automatisation (Beckhoff TwinCat, Profibus/-net)
Excellente reproductibilité des mesures
En fonction de l’application, il est possible d’effectuer des balayages d’un seul point ou de toute la surface pour un contrôle à 100 %.
Contrôle automatisé des processus
Pour évaluer les processus de production sur la base de données de mesure, un capteur de lumière diffusée peut être utilisé pour le contrôle de la qualité et des processus en combinaison avec un bras robotisé. En quelques secondes, le bras robotisé peut accéder à des points particulièrement pertinents de pièces telles que les articulations artificielles, les paliers de vilebrequin, les grilles de connexion des circuits intégrés ou les surfaces peintes, et les analyser. En mesurant plusieurs points sur une pièce, il est possible de tirer des conclusions statistiques sur la qualité de la surface. En effectuant 50 mesures ponctuelles répétées sur une articulation artificielle du genou, OptoSurf a pu prouver une reproductibilité de s = 0,0078.
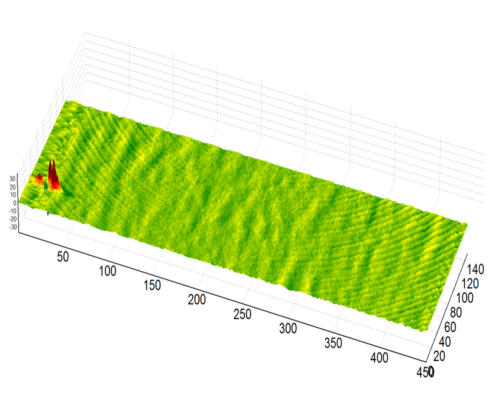
Balayage de surfaces avec un robot
Même des surfaces entières peuvent être mesurées à l’aide d’un robot. Ceci est réalisé avec des mouvements linéaires et un décalage qui est programmable selon le degré de détail requis. Le logiciel SW 3D fusionne les données et les affiche sous forme de carte. Cette représentation cartographique en 3D permet de tirer des conclusions sur l’homogénéité du processus ou les effets de brillance visuelle, par exemple.
Produits similaires
-
OptoSurf Capteur OS 500
Capteur pour la mesure des surfaces rectifiées
-
OptoWorm
Dispositif de mesure pour vis sans fin électrique EPS Worms
-
OptoSurf Capteur OS 500 LINEAIRE
Capteur intégré sur la ligne de production